
















CS機器人抖動排查
1.簡介
本文將介紹如何排查機器人抖動問題
2.機器人運動軌跡抖動排查
2.1 機器人螺絲松動
檢查機器人本體上的螺絲是否松動或丟失、機器人末端的工具是否有松動,工作臺是否本身就抖動,機器人會因為震動而對緊固件產(chǎn)生振動,長時間運動后螺絲可能會松動或者丟失,導致機器人抖動。如圖2-1-1所示機器人本體與底座的螺絲松動。

圖2-1-1
2.2 設(shè)置負載數(shù)據(jù)不正確
檢查負載數(shù)據(jù)過高或過低、重心是否設(shè)置正確,設(shè)置的數(shù)據(jù)與實際差異太大可能會引起抖動!如圖2-2-1所示查看負載設(shè)置的是否正確。

圖2-2-1
2.3 速度設(shè)定不合理
速度設(shè)置不合理會造成機械手運動不流暢,或加速度變化過大引起機器人震動,因此,在機器人速度設(shè)置中要合理,直線速度建議加速度最大9000mm/s2 速度最大1500mm/s ,一般加速度要是速度的3-5倍。 建議最大關(guān)節(jié)速度150°/S 關(guān)節(jié)加速度1500°S2(應當根據(jù)兩點距離來調(diào)整速度與加速度,才能達到最優(yōu)速度)如圖2-3-1所示:
如果第一次接觸艾利特機器人,對速度沒有完全理解可以參考以下推薦速度參數(shù)。
最大直線速度1200mm/s,最大直線加速度6000mm/s2,推薦直線加速度3000mm/s。建議正常運行按照高速1000mm/s,6000mm/s2;中速600mm/s,3000mm/s2;低速250mm/s,1200mm/s2。
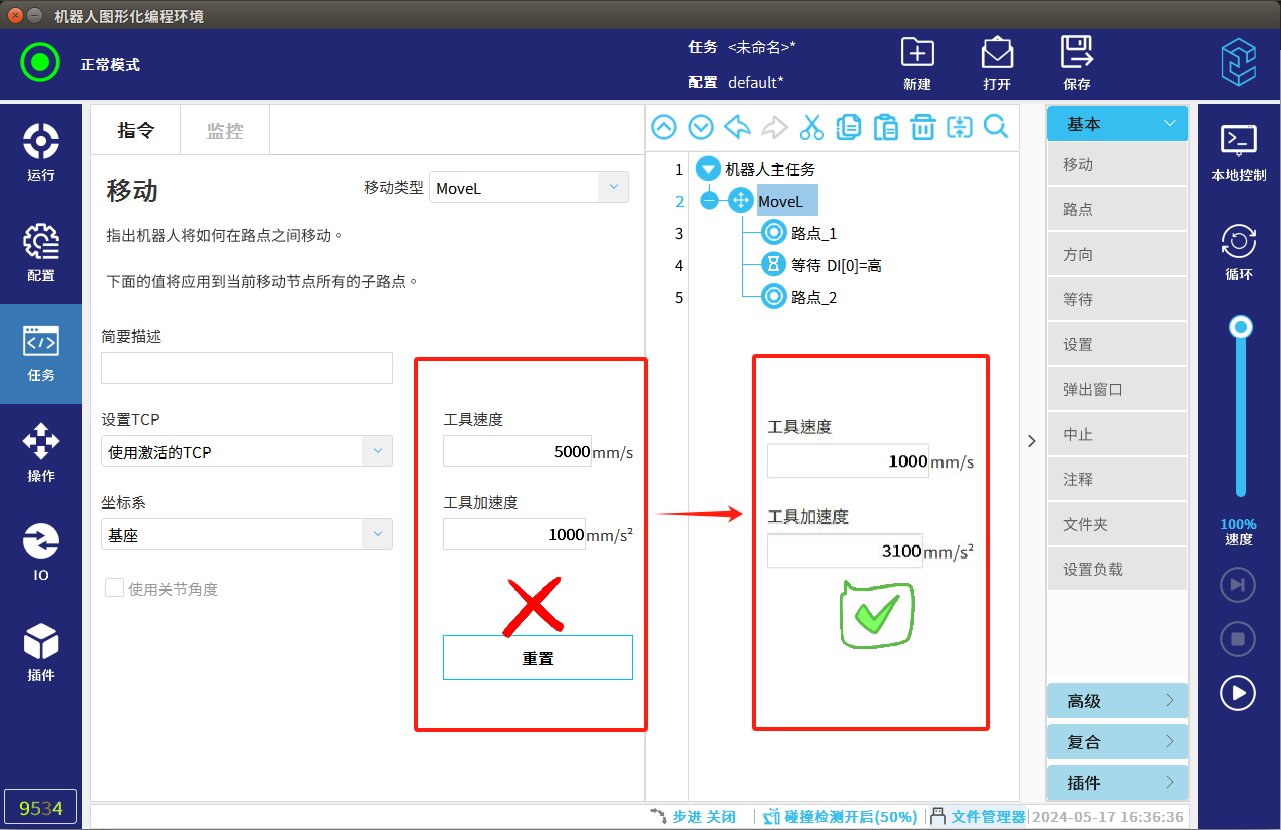
圖2-3-1
2.4 本體硬件損壞
按住示教器背面的自由驅(qū)動按鈕或點擊操作選項卡的“拖動”,手動拖動每個軸檢查是否有卡頓,無卡頓建議從2.1-2.4步驟進行排查,有卡頓大概率為碰撞導致諧波減速機,交叉滾子軸承損壞,需聯(lián)系艾利特相關(guān)人員進行本體的維修。
3.機器人點到點抖動排查
所謂的點到點抖動就是機器人運動到目標點后抖動,不是運動過程中抖動
3.1 CR不為0 (轉(zhuǎn)接半徑),且后面有時間等待或者條件等待
只要CR不為0 ,且后面有時間等待或者條件等待,機器人會轉(zhuǎn)彎時快速停止 ,也就是點到點抖動,不是運動軌跡抖動 ,然后就可能造成其他報警 ,抖動造成的效果類似碰撞,長期這樣也會對減速器損傷。如圖3-1-1所示:
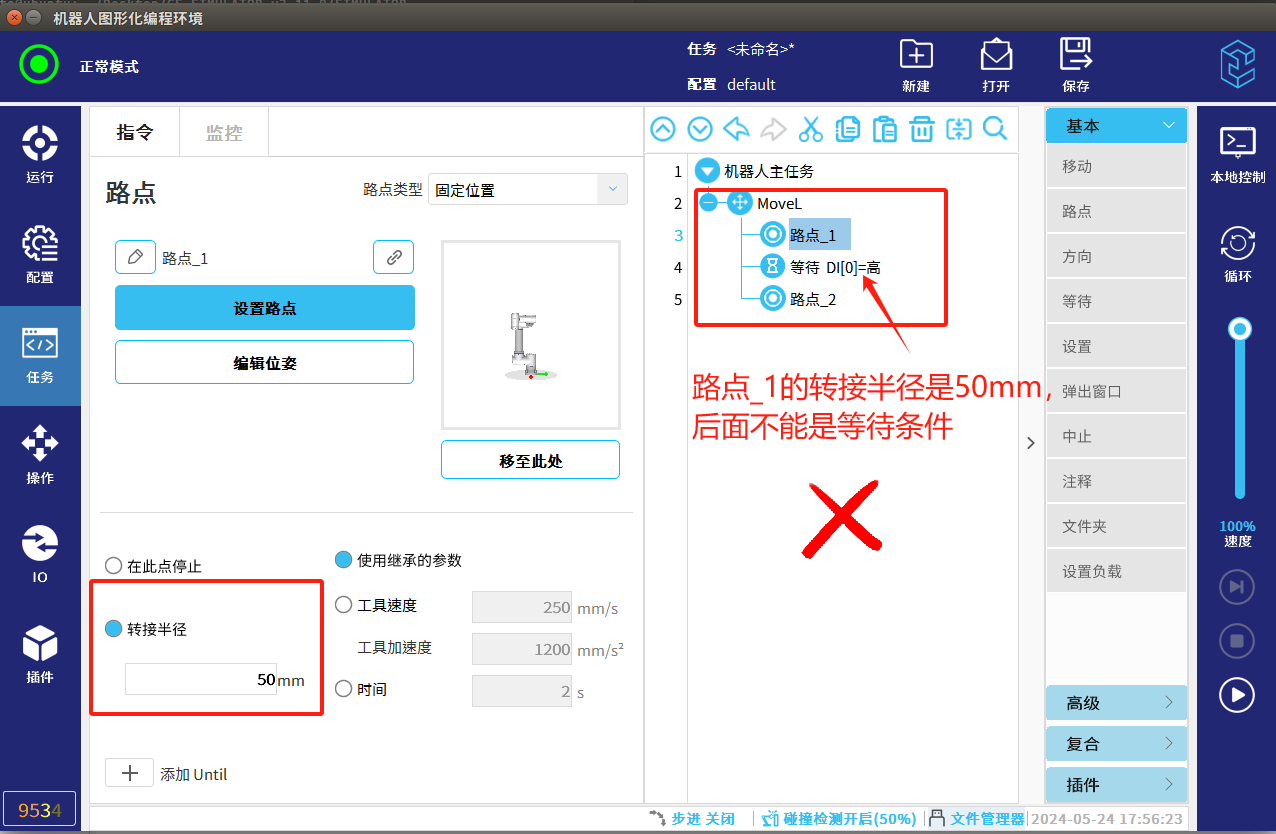
圖3-1-1
3.2 程序中有死循環(huán)
檢查程序中是否有死循環(huán)會導致機器人CUP過載,CPU過載也會導致機器人抖動,例如程序中一直if循環(huán)判斷且條件多次不滿足的時候程序會進入死循環(huán),使用線程時線程中沒有加等待時間程序也會進入死循環(huán)如圖3-2-1,應該在循環(huán)/線程中加等待時間避免出現(xiàn)死循環(huán)CPU過載后導致機器人點到點抖動如圖3-2-2所示。

圖3-2-1
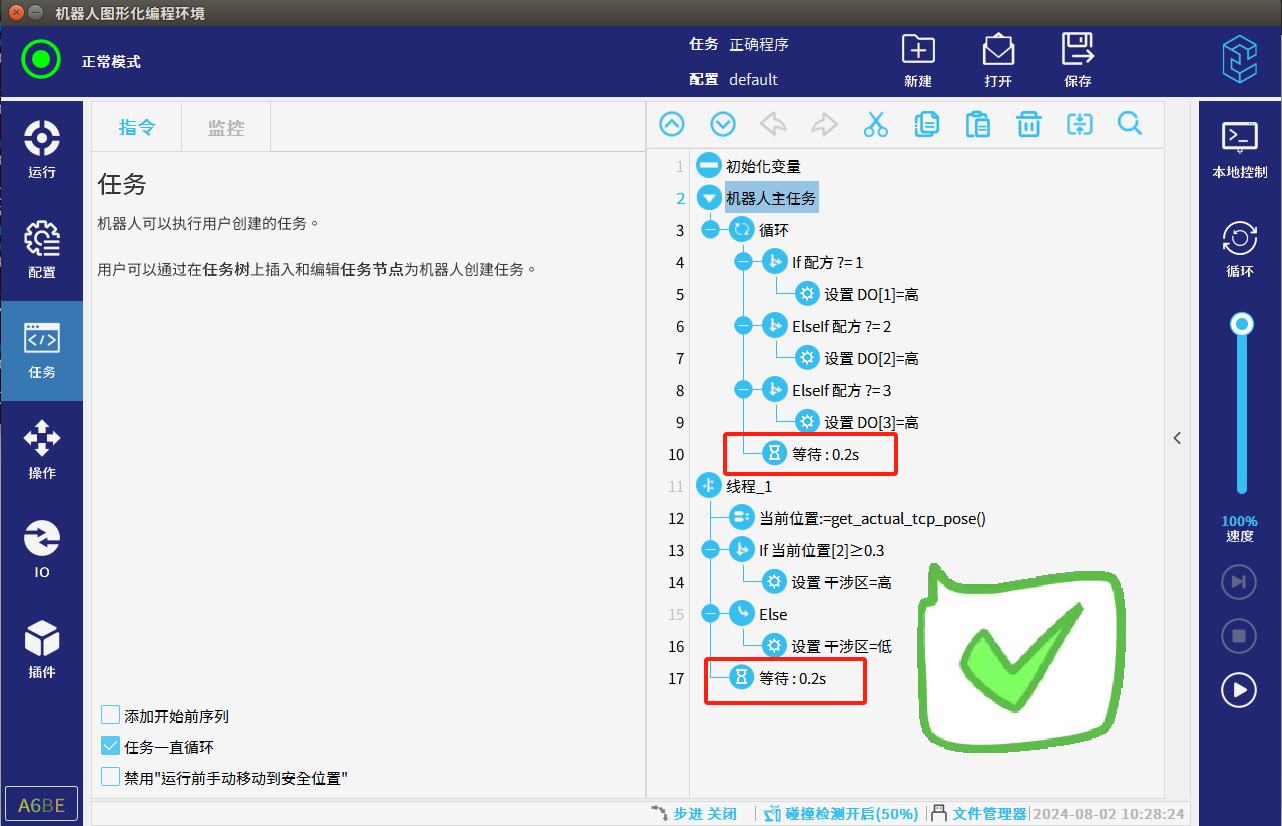
圖3-2-2
4.低頻抖動抑制功能(需在艾利特技術(shù)人員帶領(lǐng)下執(zhí)行)
如果通過以上方法未排除出抖動原因且手動手動拖動無卡頓且機器人運動軌跡抖動,可以試試通過低頻抖動抑制功能使機器人減少抖動。
抑制功能說明:低頻抖動抑制功能可以在一定程度上抑制運行過程中出現(xiàn)的持續(xù)抖動,從實現(xiàn)方式上有手動調(diào)整和自動抑制兩種,涉及到的參數(shù)有:
Pn0C低頻抖動抑制模式選擇;
Pn30抖動抑制頻率 設(shè)定為測定出的持續(xù)振動頻率;
Pn31抖動抑制補償 用于對低頻抖動抑制阻尼增益補償;
Pn32抖動抑制阻尼 用于設(shè)定低頻抖動抑制的阻尼增益。
通常在出廠時,Pn0C 被設(shè)定為 0,即標準抑制模式,振動抑制參數(shù)均由控制 器下發(fā)。在后續(xù)使用機器人的過程中,若出廠設(shè)定的默認參數(shù)對于實際工況下的 抖動抑制能力達不到特定需求時,則可通過調(diào)整伺服參數(shù)Pn0C 進行自動低頻抖 動抑制。
1.自動抑制:
目前有兩種自適應抖動抑制模式,均通過設(shè)定 Pn0C 進行模式切換。
當Pn0C = 1 時啟動自適應模式 1:該模式下對特定頻率施加參數(shù)自適應振 動抑制,適用于對特定軌跡及速度不經(jīng)常改變的情況下,對于運行抖動要求嚴格 的場合;
當Pn0C = 2 時啟動自適應模式 2:該模式下施加參數(shù)固定的全時振動頻率 自適應調(diào)整的振動抑制,適用于軌跡、運行速度都經(jīng)常變化的場合,此時對于特 定速度下的振動抑制強度通常會略弱于自適應模式1。
操作步驟如圖4-1所示:

圖4-1
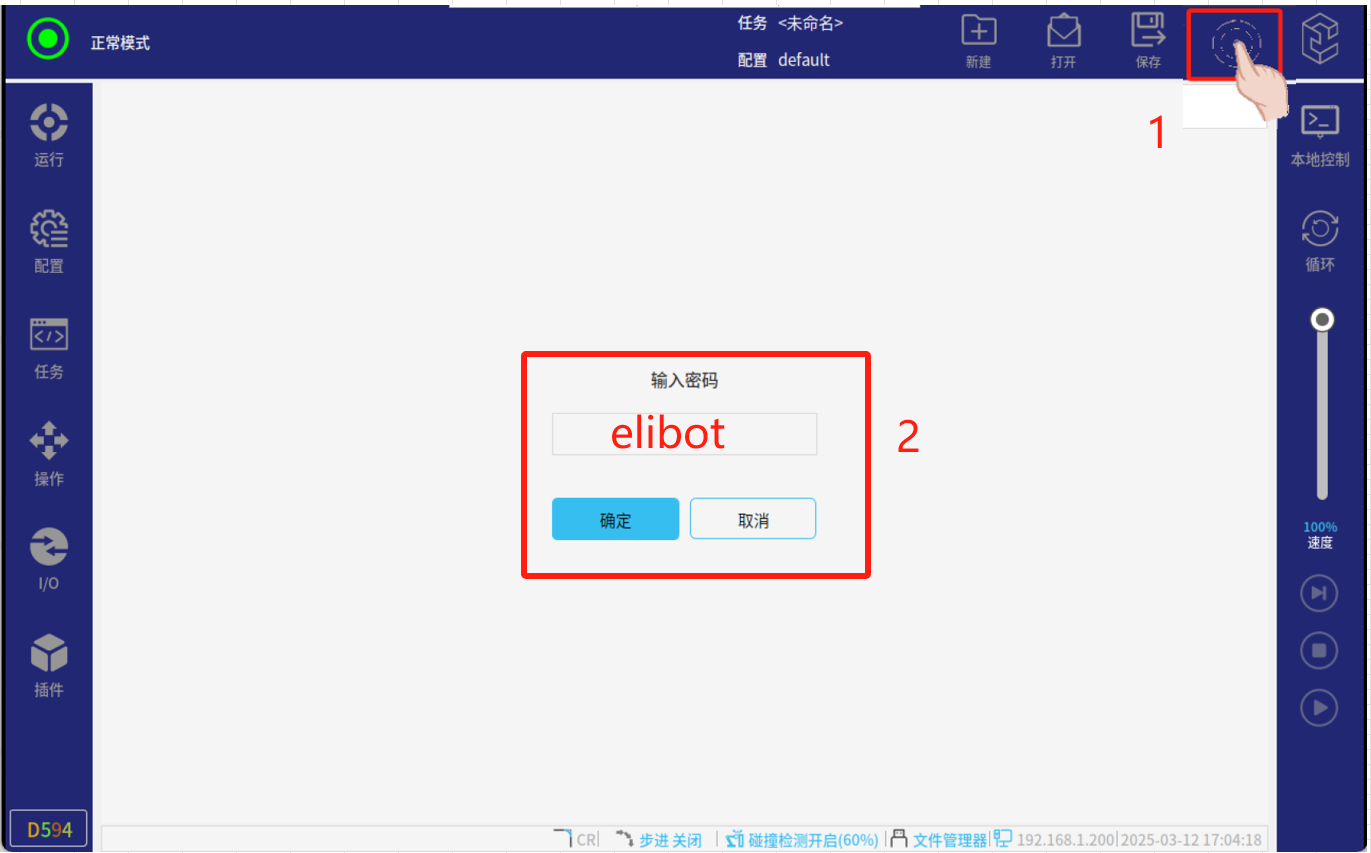
1.在正常模式下點擊如圖4-1所示右上角紅框標注區(qū)域(連續(xù)快速點擊 5-8 次)就會出現(xiàn)輸入密碼頁面界,然后輸入密碼:elibot,進入專家模式。
2.選擇伺服參數(shù)。
3.選擇需要自動抑制的伺服(比如一軸需要抑制就選伺服1)。
4.找到0x0C參數(shù),寫入1/2(輸入自己想要的自適應模式),然后退出即可。
在運行了上述自適應低頻抖動抑制功能后,伺服會自動學習一組合適的抑制振動的參數(shù),此時需要單次執(zhí)行腳本 joint_config_bind()進行數(shù)據(jù)保存,如圖4-2所示,腳本執(zhí)行完成后可以在 下位機中進行查看,路徑為:/rbctrl/eli_robot_data/joint_bind.conf;
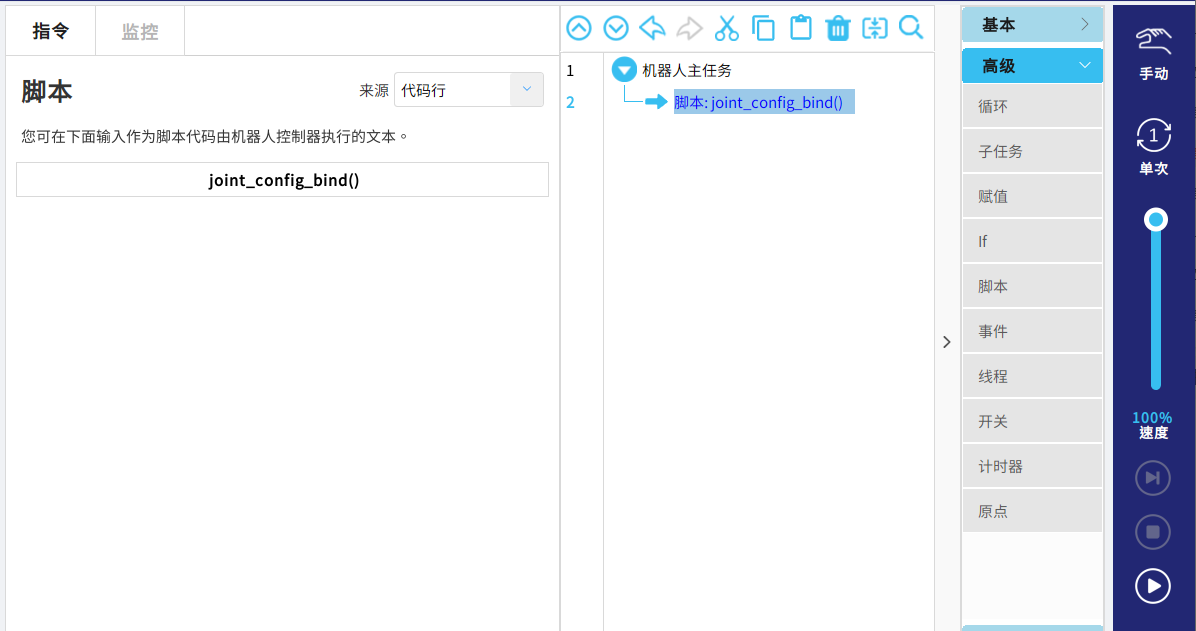
圖4-2
2.手動抑制:
當通過自動抑制功能仍然無法很好的抑制抖動時,此時可通過手動調(diào)整伺服 參數(shù)Pn30~Pn32 進行抑制,步驟如下:
1.通過EliteMain進行數(shù)據(jù)采集并觀察每個軸的轉(zhuǎn)矩波形,當波形中出現(xiàn) 抖動較大的情況時,測量該頻率;(EliteMain軟件需聯(lián)系艾利特技術(shù)人員獲取)
2.將測量出的頻率值設(shè)定到伺服參數(shù)Pn30 中,Pn31 默認為 100,逐步增加Pn32 的值;
3.在 0~200 的范圍內(nèi)以 10 為單位逐漸增大 Pn32 的設(shè)定值,當 Pn32 達到200 后仍然無法獲得良好的抑制效果時,此時需要降低控制增益( 0x10 // 速度環(huán)增益)。
4.在完成上述內(nèi)容后,同時得到了合適的抑制參數(shù)時,需要執(zhí)行腳本joint_config_bind()進行數(shù)據(jù)保存,如圖4-2所示。
a.EliteMain使用方法:
1.根據(jù)需求選擇對應的窗口,現(xiàn)需使用伺服參數(shù)。

圖4-3
2.伺服參數(shù)界面操作流程:(該界面可對關(guān)節(jié)的伺服參數(shù)進行讀取,修改,備份以及加載)
1.點擊上圖所示的伺服參數(shù)按鈕,進入伺服參數(shù)界面,選擇對應系列的機器人(輔MCU無用,無需勾選),如圖4-4所示:

圖4-4
2.輸入對應的IP地址,以及密碼:(cs密碼:elibot),如圖4-5所示:

圖4-5
監(jiān)視數(shù)據(jù):
功能:其內(nèi)主要是對關(guān)節(jié)的力矩,速度等信息的采集,主要分四個區(qū):網(wǎng)絡(luò)連接區(qū),類型選擇區(qū),軸區(qū)以及采集區(qū)
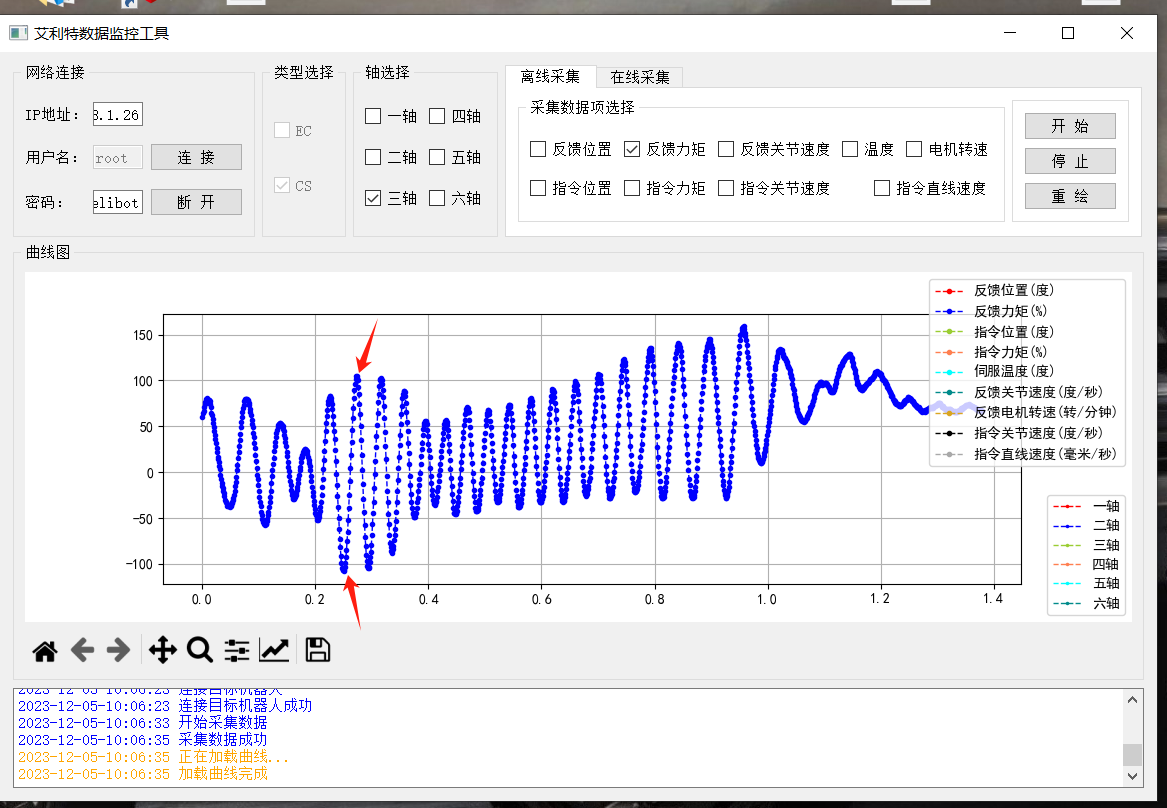
圖4-6
由圖4-6中的波形圖可知從波峰到波谷的值已經(jīng)超過200,說明三軸確實存在抖動。
操作方法:
1.選擇對應系列的機器人(CS)
2.登錄,輸入所對應的ip以及密碼(FB1網(wǎng)口,必須是遠程模式)
3.選擇相對應的軸
4.在離線采集內(nèi),選擇想要采取的內(nèi)容
5.點擊開始
6.轉(zhuǎn)動對應的軸,轉(zhuǎn)動結(jié)束后,點擊停止(需要放大波形圖才好分析,比如某個軸一直抖動,那可以不用采集太長的時間,這樣波形就會放大)
7.開始采集波形時,機器人會進入產(chǎn)測模式,調(diào)整參數(shù)完成后需要手動推出產(chǎn)測模式
b.頻率計算:
由圖4-7放大后的波形圖可知:時間間隔是 0.2s(橫軸每一格子),0.2到0.4大概有5個電流周期,1s有5個0.2s(橫軸格子5個) ,那么這個頻率的計算為:5×5=25hz
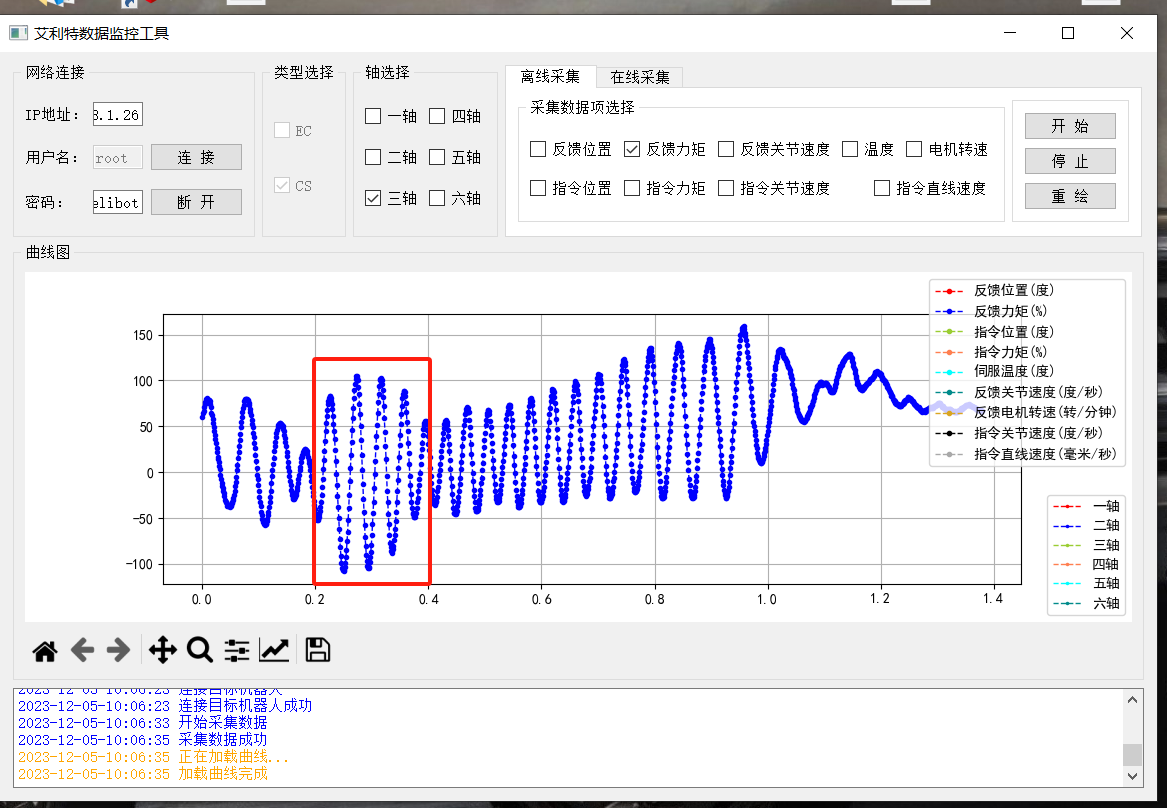
圖4-7
c.頻率寫入:
例如圖4-7的波形圖計算出頻率為25hz,機器人是以0.1hz為單位的所以需要寫入250到0x30中。
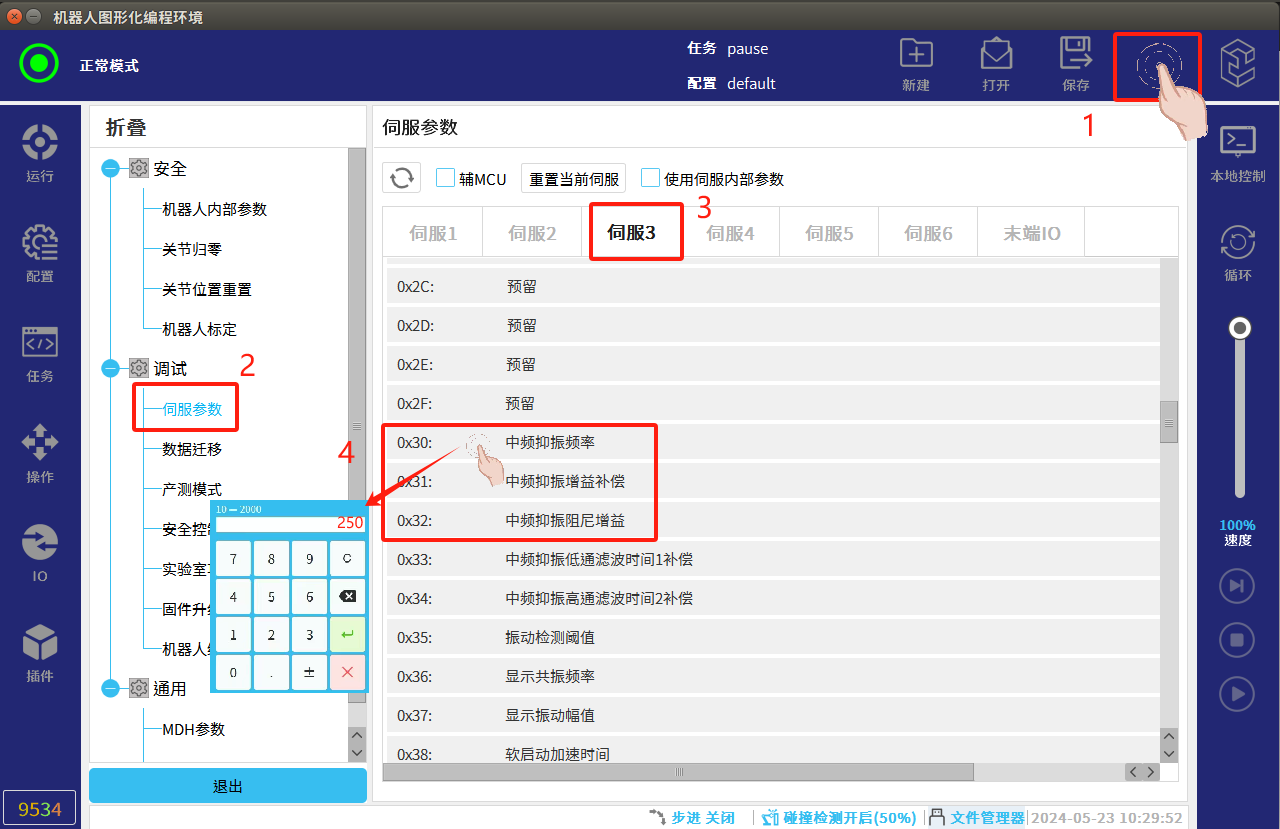
圖4-8
1.在正常模式下點擊如圖4-8所示右上角紅框標注區(qū)域(連續(xù)快速點擊 5-8 次)就會出現(xiàn)輸入密碼頁面界,然后輸入密碼:elibot,進入專家模式。
2.選擇伺服參數(shù)。
3.選擇需要寫入頻率的伺服(比如3軸需要抑制就選伺服3)。
4.找到0x30參數(shù),寫入計算好的頻率(單位0.1hz)后觀察效果不佳時,逐步增加Pn32 的值,Pn31 默認為 100。
5.在 0~200 的范圍內(nèi)以 10 為單位逐漸增大 Pn32 的設(shè)定值,當 Pn32 達到200 后仍然無法獲得良好的抑制效果時,此時需要降低控制增益(0x10 // 速度環(huán)增益)。
3.新增高魯棒性震動抑制:
在2.13.1版本抑制進行了優(yōu)化,新增了高魯棒性震動抑制功能,涉及參數(shù)Pn33,Pn34。
1、檢查伺服是否為2.13.1及以上版本;
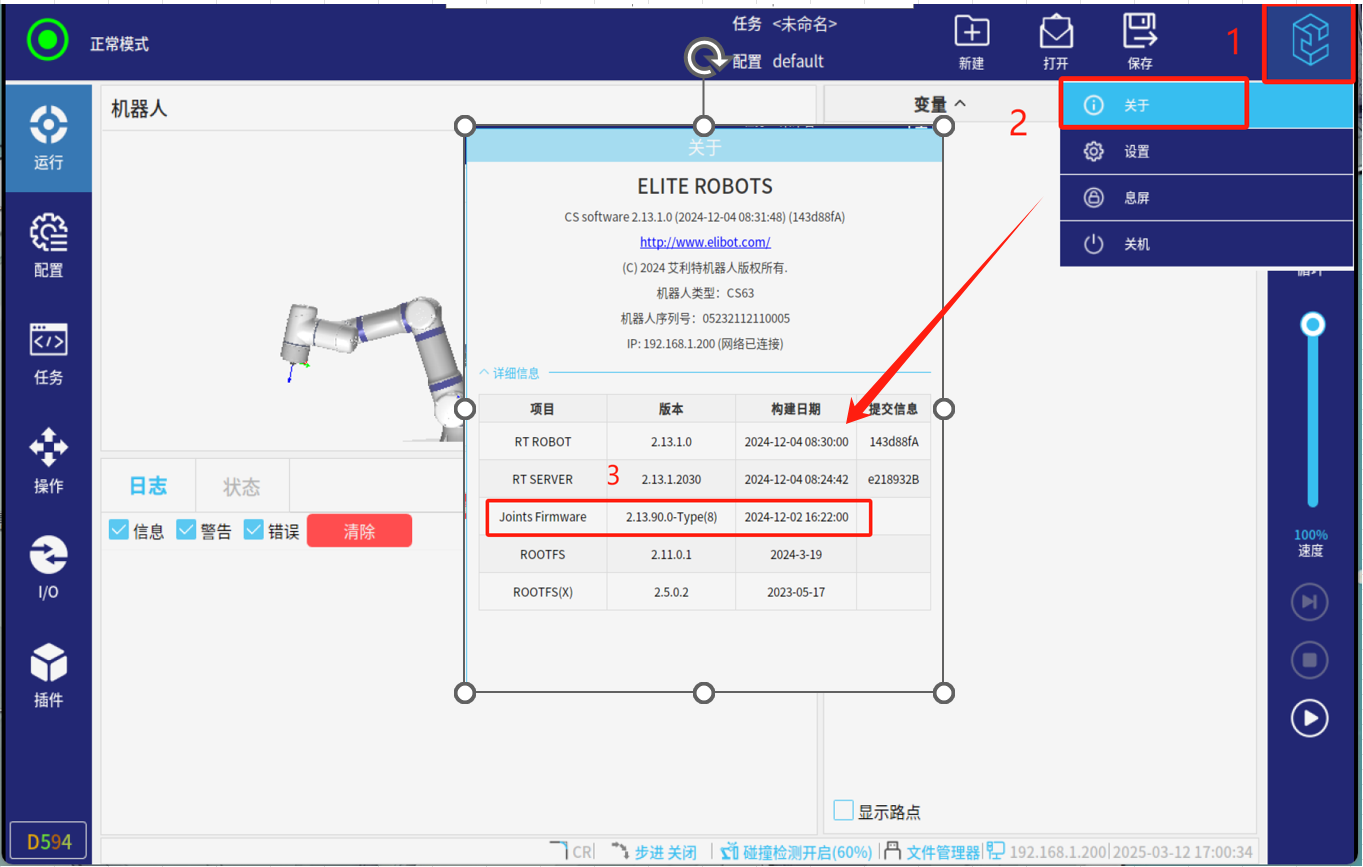
2、在正常模式下點擊如圖4-1所示右上角紅框標注區(qū)域(連續(xù)快速點擊 5-8 次)就會出現(xiàn)輸入密碼頁面界,然后輸入密碼:elibot,進入專家模式;
3、由于CS控制器上電后會自動下發(fā)部分參數(shù),因此使用該固件時,需要在伺服參數(shù)頁面將“使用內(nèi)部參數(shù)"勾選;,選擇需要抑制的伺服(比如一軸需要抑制就選伺服1);

4、初期調(diào)試將Pn32均設(shè)置為0,如發(fā)生無法抑制時,可進行設(shè)定,否則保持為0即可;

5、將Pn33設(shè)置為100,Pn34從0-300可調(diào),用于調(diào)整抑制強度,通常設(shè)定在100;
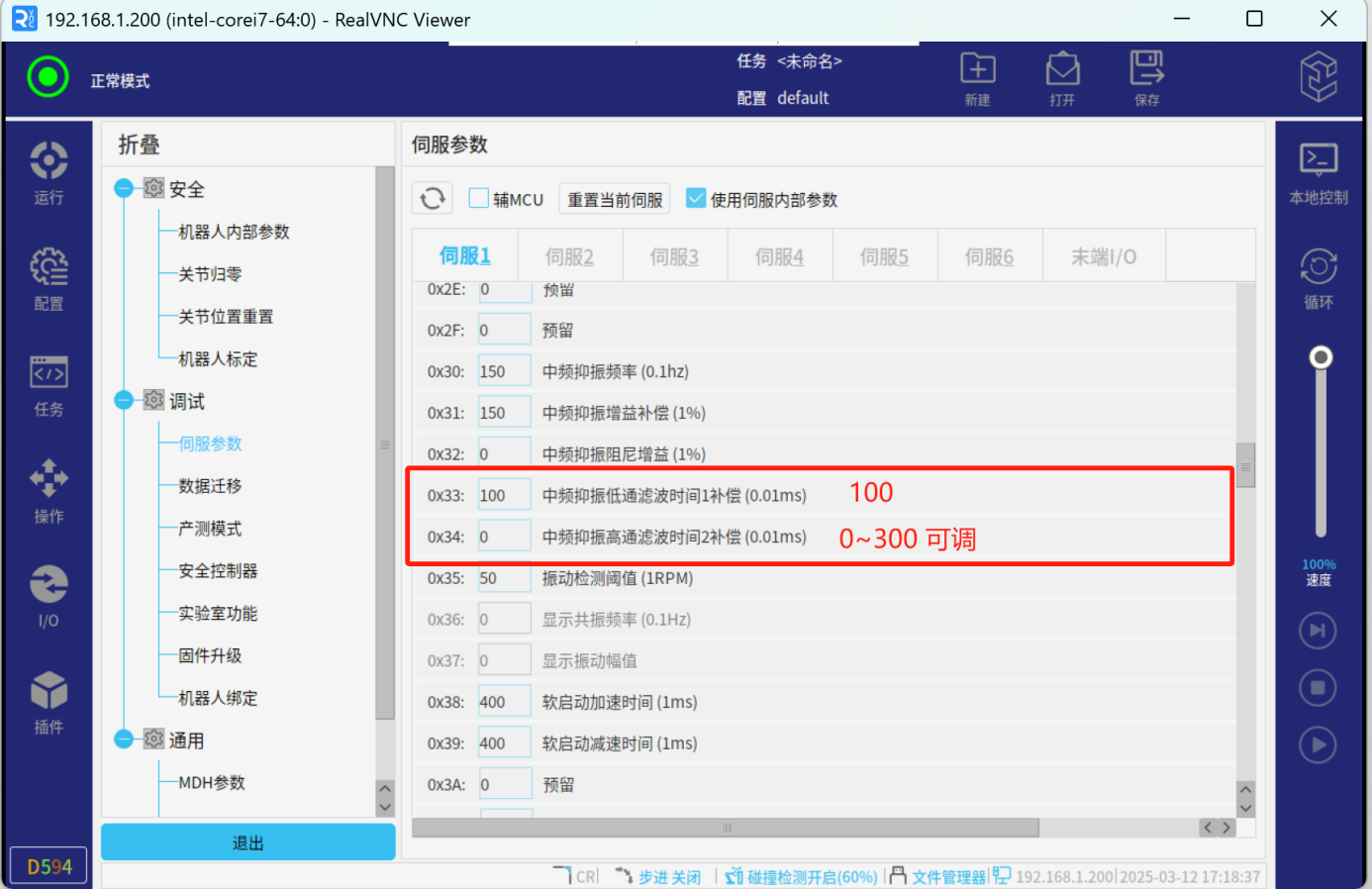
6、調(diào)整好參數(shù)后,需要保存至伺服,否則再次上電調(diào)整好的參數(shù)會丟失,Pn03參數(shù)寫入5進行保存,機器人顯示待機狀態(tài)說明保存成功。

5.常見問題解答
1.根據(jù)實際工具情況,合理設(shè)置機器人負載數(shù)據(jù)。
2.要根據(jù)實際情況合理設(shè)定速度。
3.點位CR不為0 (轉(zhuǎn)接半徑),后面不能有時間等待或者條件等待。
4.調(diào)試過程中速度盡量放慢,碰撞檢測要打開,避免發(fā)生碰撞機器人發(fā)生抖動。
5.運輸過程中需要機器人的2 3軸不要受力,有支撐,合理的打包姿態(tài)運輸能能夠有效的避免機器人抖動。打包姿態(tài)如圖3-1:
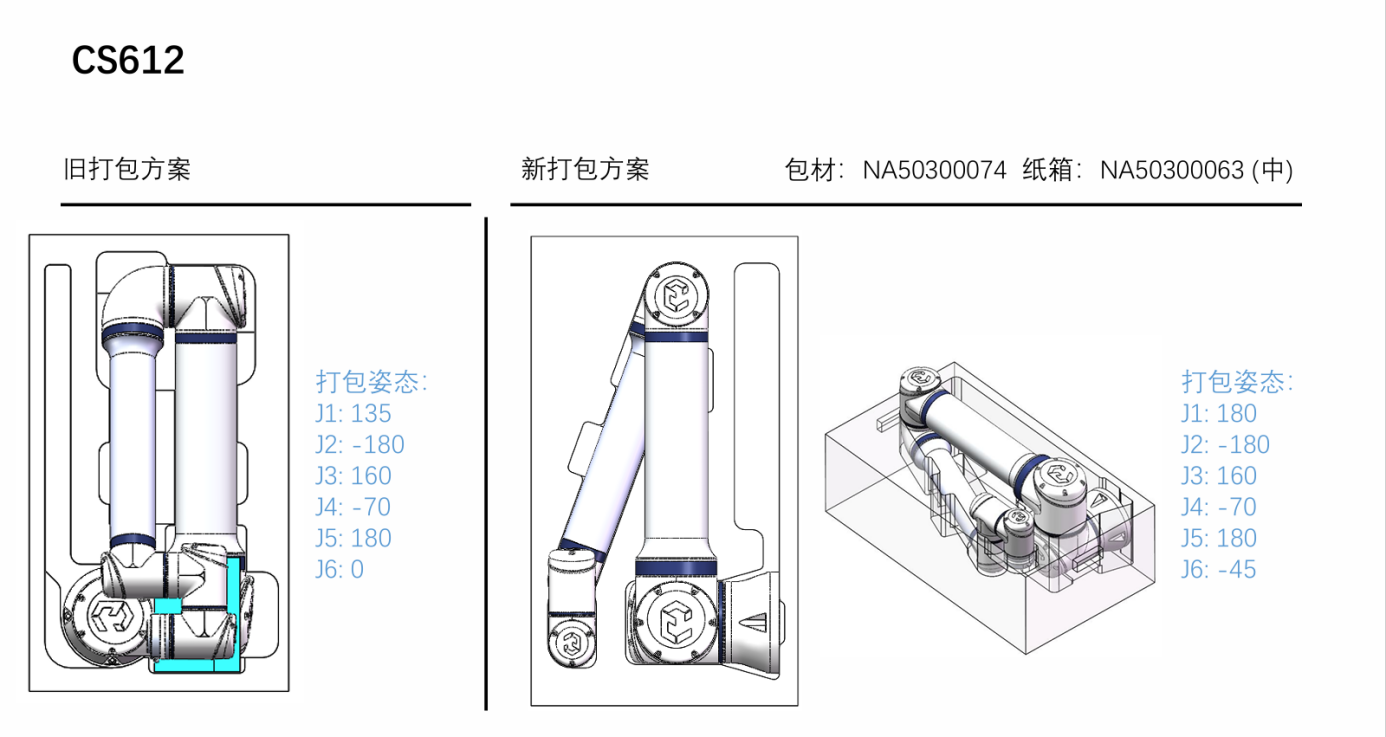
圖5-1
6.開始采集波形時,機器人會進入產(chǎn)測模式,調(diào)整參數(shù)完成后需要手動退出產(chǎn)測模式
7.登錄,輸入所對應的ip以及密碼(FB1網(wǎng)口,必須是遠程模式)


























